I am working on a project that has 2 binaries in 1 workspace. Initially, both binaries will be running on the same machine, but I can imagine a future where that's not the case.
One of the binaries is a Discord bot for which I am using an async framework (serenity). Whenever a user interacts with the bot using a command, I need to communicate with the other binary.
Currently, I am using tmq, which is tokio-fied ZeroMQ. There is one issue with that crate: the server/client messaging is not Sync. So, I can't just spawn a tokio thread and wait for IPC messages from the other binary in there.
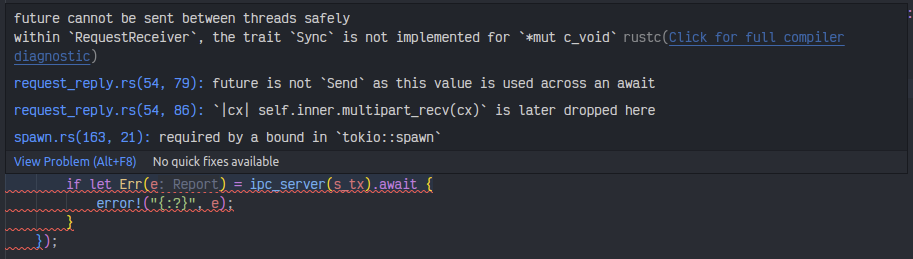
I worked around that by having a separate tokio thread with a LocalSet that communicates with the main thread using an unbounded channel.
As both binaries run async code, I find myself in some sort of channel hell. For one command in Discord where I need to get information from the other binary, I have to create a lot of channel communication details, like adding message enum variants, awaiting response messages, etc.
It gets convoluted very quickly and I was wondering if there is a better way.
What I ideally want is some form of bi-directional, client/server IPC channel between these two binaries, for which the server can run in it's own tokio thread and where I can send messages to from the client (Discord bot).
(Another requirement (which made me choose ZMQ in the first place) is that sometimes a message is published from the other binary to the Discord bot, where the Discord bot is a subscriber to and subsequently posts a message in a Discord channel. I can keep using ZMQ for this, though, but maybe it could be replaced with something better)
Does something like that exist? Or am I thinking too optimistic and do I simply need a lot of boilerplate to get IPC working?